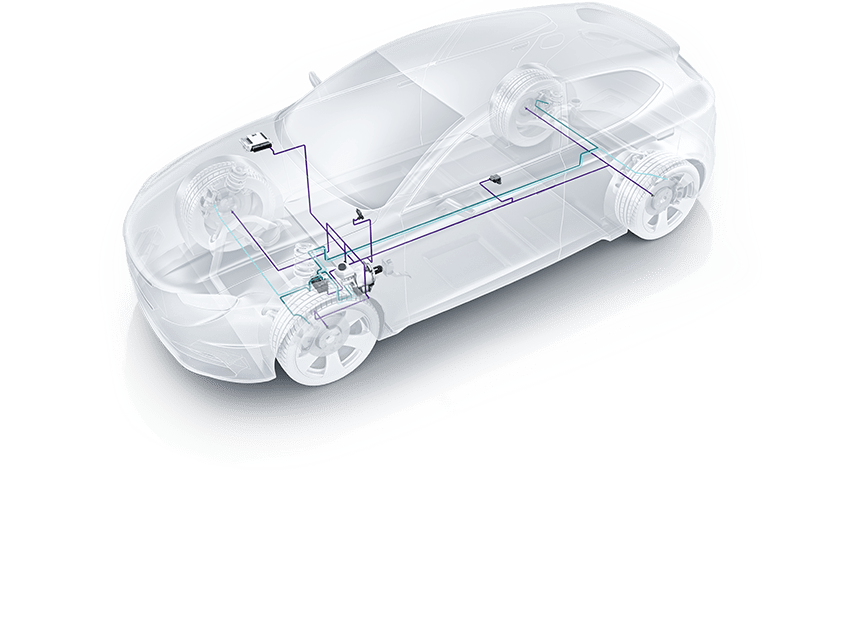
The electronic stability program (ESP®) supports the driver in nearly all critical driving situations. It comprises the functions of the antilock braking system (ABS) and the traction control system, but can do considerably more. It detects vehicle skidding movements, and actively counteracts them. This considerably improves driving safety.
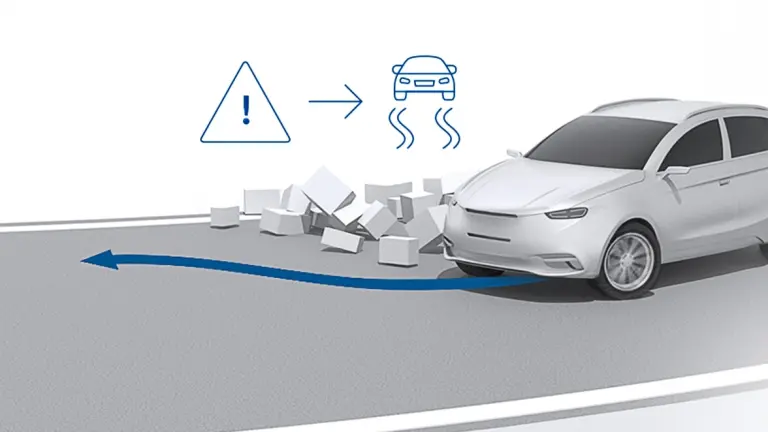
up to
80 %
of all skidding accidents could be prevented.
25
times per second the ESP® control unit compares the actual movement of the vehicle with the desired direction of travel.